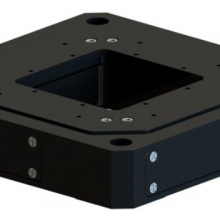
在过去十年中,我国自主研发的北斗芯片工艺不断进步,从90纳米到28纳米,尺寸越来越小,性能不断提高。这使得我国具备了在全球范围内竞争的实力和信心。***近举办的第十届中国卫星导航年会宣布,我国正在研发一种22纳米高精度、低功耗的北斗定位芯片。结合北斗三号全球系统的建成,这种22纳米工艺的芯片将使我国的北斗系统能够应用于无人机、自动驾驶、机器人、物联网等热门领域,并为北斗在全球范围内提供更好的服务。据了解,这款芯片是由国内创新卫星导航企业北斗星通旗下的芯片公司和芯星通共同研发的。 在***环境下研究纳米尺度下的物理学与材料学已成为学术研究的热点。压电纳米定位台

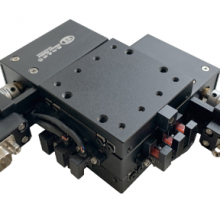
亚微米角位台是一种用于测量和控制微小角度变化的仪器。它通常由一个旋转平台和一个角度传感器组成。下面是亚微米角位台的工作原理的详细解释:旋转平台:亚微米角位台的重要部件是一个旋转平台,它可以在水平方向上旋转。旋转平台通常由高精度的轴承和驱动系统组成,以确保平稳的旋转运动。角度传感器:亚微米角位台上安装了一个高精度的角度传感器,用于测量旋转平台的角度变化。角度传感器可以是光学传感器、电容传感器或者霍尔传感器等。这些传感器能够检测旋转平台的微小角度变化,并将其转化为电信号。 高精度纳米位移电磁控制平台纳米促动器与传统促动器有何不同?
纳米促动器是一种利用纳米技术制造的微型装置,用于在纳米尺度上推动物体或实现微小运动。这些促动器可以通过不同的机制,如化学反应、光能或磁场等,实现对微小物体的控制和操纵。纳米促动器在纳米技术领域具有广泛的应用前景,可以用于医学、生物学、材料科学等领域的研究和应用。
纳米促动器是一种利用纳米技术制造的微型装置,用于在纳米尺度上操控和推动物质。纳米促动器通常由纳米材料或纳米结构构成,利用微小的力或能量来实现对物质的操控和推动。这些装置可以在纳米尺度上实现***的运动和操作,具有广泛的应用前景。
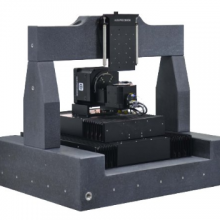
带宽:指的是平台运动的振幅下降3dB的频率范围。它表示了平台能够跟随驱动信号的速度。漂移:指的是位置随时间的变化,包括温度变化和其他环境因素的影响。漂移可能来自于机械系统和电子设备。摩擦:摩擦是指运动过程中接触面之间的阻力。由于使用弯曲,摩擦可能是恒定的或与速度有关。然而,Piezoconcept的纳米定位器是无摩擦的。滞后:指的是前向扫描和后向扫描之间的定位误差。闭环控制是解决这个问题的理想方法,通过使用高分辨率硅传感器网络提供反馈信号来实现。正交性误差:指的是两个定义的运动轴的角度偏移,使它们相互之间成为正交。这可以解释为串扰的一部分。阶跃响应时间:指的是纳米定位器从指令值的10%到指令值的90%所需的时间。阶跃响应时间反映了系统的动态特性。 纳米促动器有哪些应用领域?
亚微米角位台是一种高精度的测量仪器,用于测量物体的角度和角位移。它是一种光学仪器,利用光学原理和精密机械结构来实现高精度的角度测量。亚微米角位台通常由以下几个主要部分组成:主体结构:亚微米角位台的主体结构通常由高精度的导轨、支撑结构和调节机构组成。这些部件能够提供稳定的支撑和***的调节,以确保测量的准确性和稳定性。光学系统:亚微米角位台的光学系统包括光源、光学元件和探测器。光源通常是一束激光或其他高亮度的光线,用于照射待测物体。光学元件包括透镜、反射镜等,用于将光线聚焦或反射。探测器用于接收和测量光线的位置和强度。标准版压电纳米定位台是为正常室温下使用而设计。压电纳米机器人应用
亚微米角位台与其他角位台相比有哪些优势?压电纳米定位台
压电纳米位移台的工作原理是基于超精密运动控制技术。这个技术集成了光学、机械、电子和控制软件等多个领域的技术。压电纳米位移台内部使用一个或多个压电陶瓷作为驱动器,来实现单轴或多轴的运动。通过柔性铰链技术,将压电陶瓷产生的运动传递和放大。超精密电容传感器将运动信息传递给控制系统,控制系统对运动进行修正、补偿和控制。通过闭环控制,压电纳米位移台可以实现纳米级别的甚至亚纳米级别的运动分辨率和运动控制精度。 压电纳米定位台